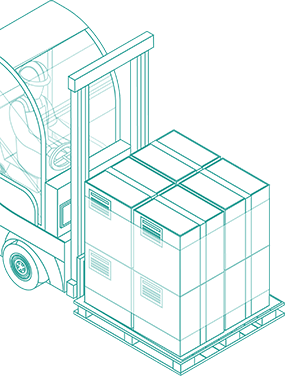
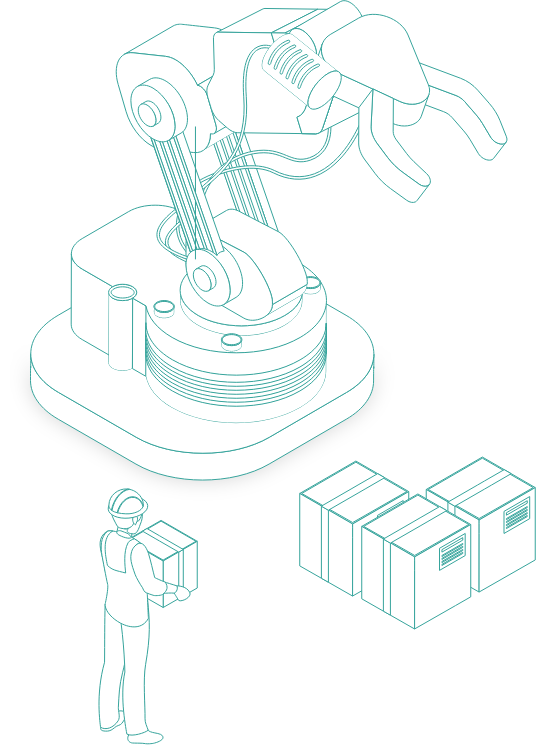
An intelligent robotic system can be a robot arm, a mobile platform or forklift, a drone or a fleet of hundrets of robotics devices
TruPhysics AI Platform
Configure your individual robotics system out of 100+ hardware, electronics and software modules, from our own portfolio as well as third party solutions. All modules are fully compatible to each other, reliable and safe.
Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore etdolore magna aliqua. Ut enim ad minim veniam, quis nostrud exercitation ullamco laboris nisi ut aliquip ex ea commodo consequat. Duis aute irure dolor in reprehenderit in voluptate velit esse cillum dolore eu fugiat nulla pariatur.
Robot Arm Gripper
Handle everything
Head
See Think Communicate
Lifter
Reach everything
Mobile Base
Move everywhere
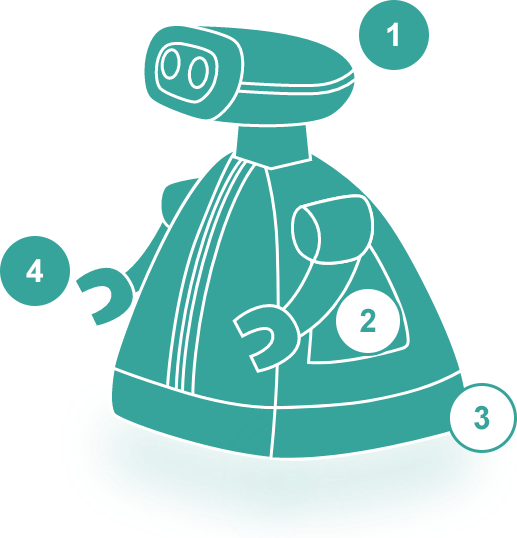
1. Head
See Think Communicate
2. Lifter
Reach everything
3. Mobile base
Move everywhere
4. Robot arm gripper
Handle everything
Hardware
To enable full compatibility and perfect fit for your individual requirements, we develop, build, wire and deploy your individual robotics solution
Software
A robot is only as intelligent, as the software that controls it. TruOS, the versatile robot operating system enhance the power of sensors and actuators
Software
A robot is only as intelligent as the software that controls it.
TruOS, the versatile robot operating system, enhancing the power of your robot.
Smart Control App
Native App for intuitive programming and teleoperation support of all TruOS supported robots
WEB/AR Configurator
Configuration of individual out of the box robot systems out of 100+ robots and components
TruFleet
Evaluation of cycle time and system performance of your handling and mobile robots
Marketplace
Platform for various machine learning and as a service skills such as teleoperation support
Robot Operating System
TruSim
Training platform for robots enables scalable and reliable virtual training of AI Skills
SDK
Use the API to create your own application or connect your robot with (MQTT, REST, Websocket, etc.)
URCaps Plugins
Various plugins for Universal Robot for gluing, welding, palletizing, 7th axis or your individual task
TruCompare
Point clouds processing and analytics for quality assurance and bin picking
Smart Control App
Smart Control App
Native App for intuitive programming and teleoperation support of all TruOS supported robots
WEB/AR Configurator
Configuration of individual out of the box robot systems out of 100+ robots and components
TruFleet
Evaluation of cycle time and system performance of your handling and mobile robots
Marketplace
Platform for various machine learning and as a service skills such as teleoperation support
SDK
Use the API to create your own application or connect your robot with (MQTT, REST, Websocket, etc.)
TruSim
Training platform for robots enables scalable and reliable virtual training of AI Skills
URCaps Plugins
Various plugins for Universal Robot for gluing, welding, palletizing, 7th axis or your individual task
TruCompare
Point clouds processing and analytics for quality assurance and bin picking
Join our Network of TruST
Our Customers
Partners & Platforms
Solutions
Select one of our already existing solutions and get in touch with our colleagues or just use our 3D Web Configurator
TruLifter Mobile
Extension for transport systems for automated handling of small load carriers in intralogistics
Handle the transport of multiple orders matching with pickup places & destination
Automated or manual loading of carriers for intralogistics transports
Variable pickup & place heights of carriers on conveyors
As Extension for our TruRunner or MiR
Payload
25 kg / 80 kg
Operating hours
6 h
Loading and unloading height
590 mm
-1325 mm
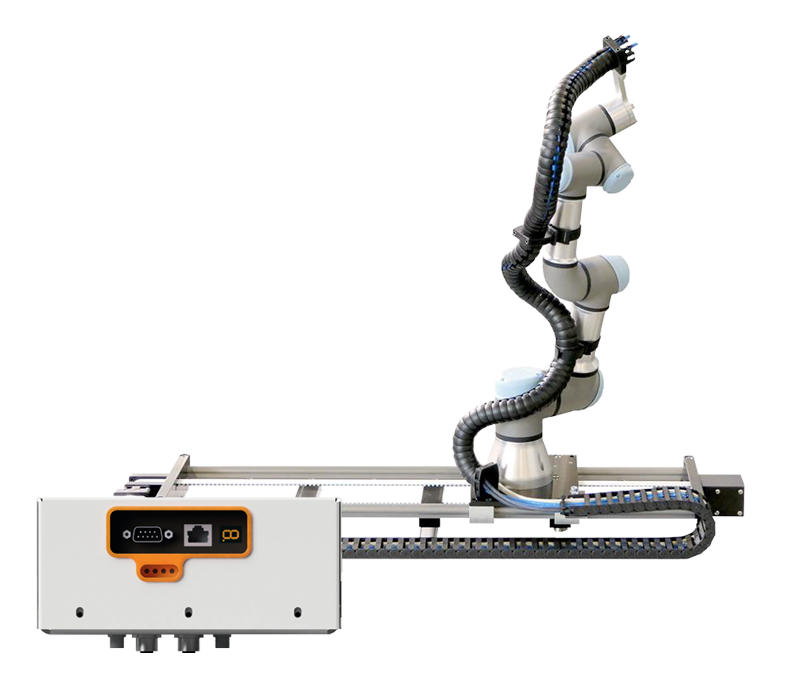
TruLifter Kit - Plug & Play Kit URCaps
Connection Kit to control up to 4 additional axis for universal robot
Connects igus linear Axis (Nema 23 / Nema 34) with UR & Epson products
7th Axis Out-of-the-Box Programming with the URCap Plug-In
Ideal concept for extending the radius of action and the flexibility of collaborative robots with another modular linear axis
Allows you to maximize the reach for all long-distance handling applications (up to 6 meter)
By using a drylin® e-toothed belt axis from Igus, you get a complete solution
TruMove DK
Development
Full Stack AGV for individual purpose
Low-cost AGV
Mecanum drive for extremely high maneuverability and optimized docking operations
In combination with TruFleet, the performance of transport operations can be highly increased
Standardized dimensions for adaptivity of existing MiR extensions (for TruMove 250)
Payload
250 kg
Omni-directional
Battery
48V, 24 Ah
TruRunner
Flagship
Fast transport AGV with lifting unit
Simple solution for long distance transport of EuroBoxes, KLT, work stations or shelves
Add Hookplate for capture, transport an release of the above
Optimization of transport operations according to the milkrun principle with the intelligent TruFleet fleet management system
Intelligence Control by TruOS and TruFleet Skill (Indoor Navigation, Object detection, MES integration)
Payload
200 kg
Height
195 mm
Operating hours
12 h
The flattest mobile robot on the market
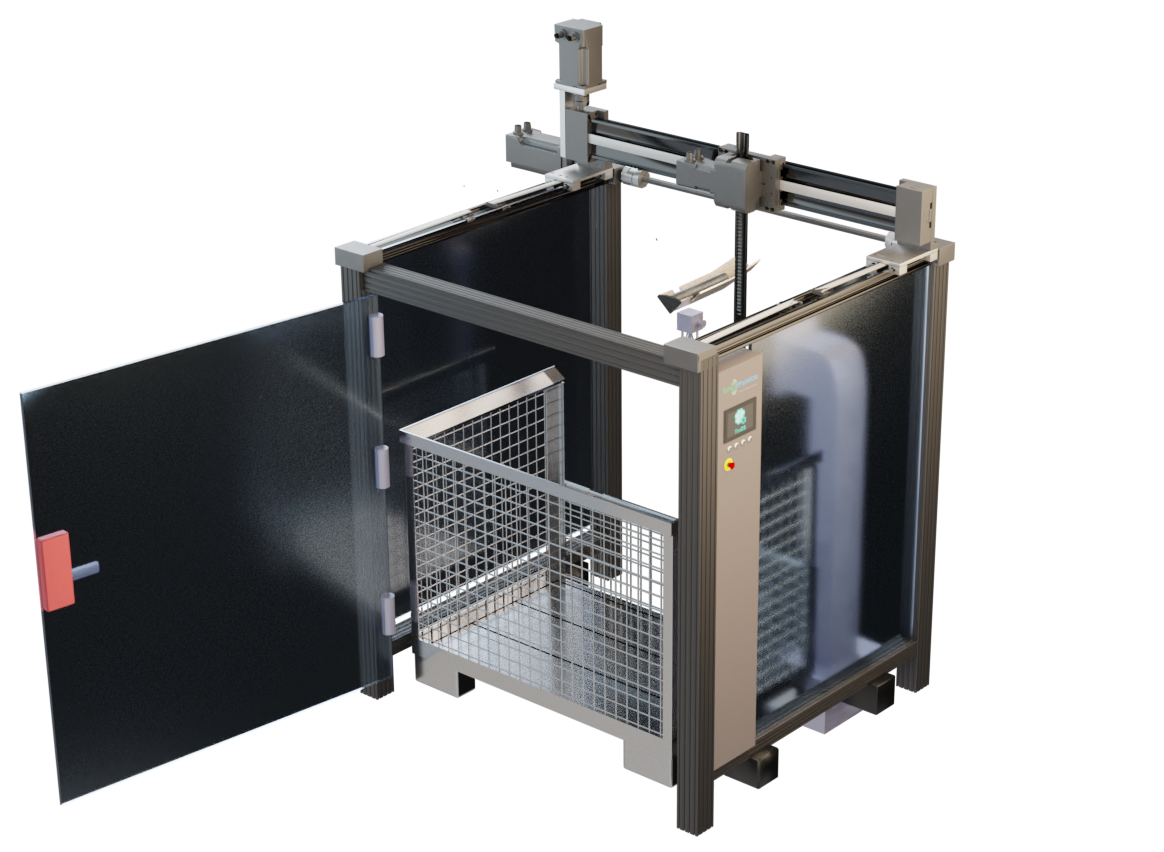
TruPortal
Gantry System for handling
Customizable gantry system with one or more axes. Individually expandable with robots, gripping applications, endeffectors and vision systems
An efficient automation solution adapted exactly to your needs
Optimal automation solution for pick & place and repalletizing applications
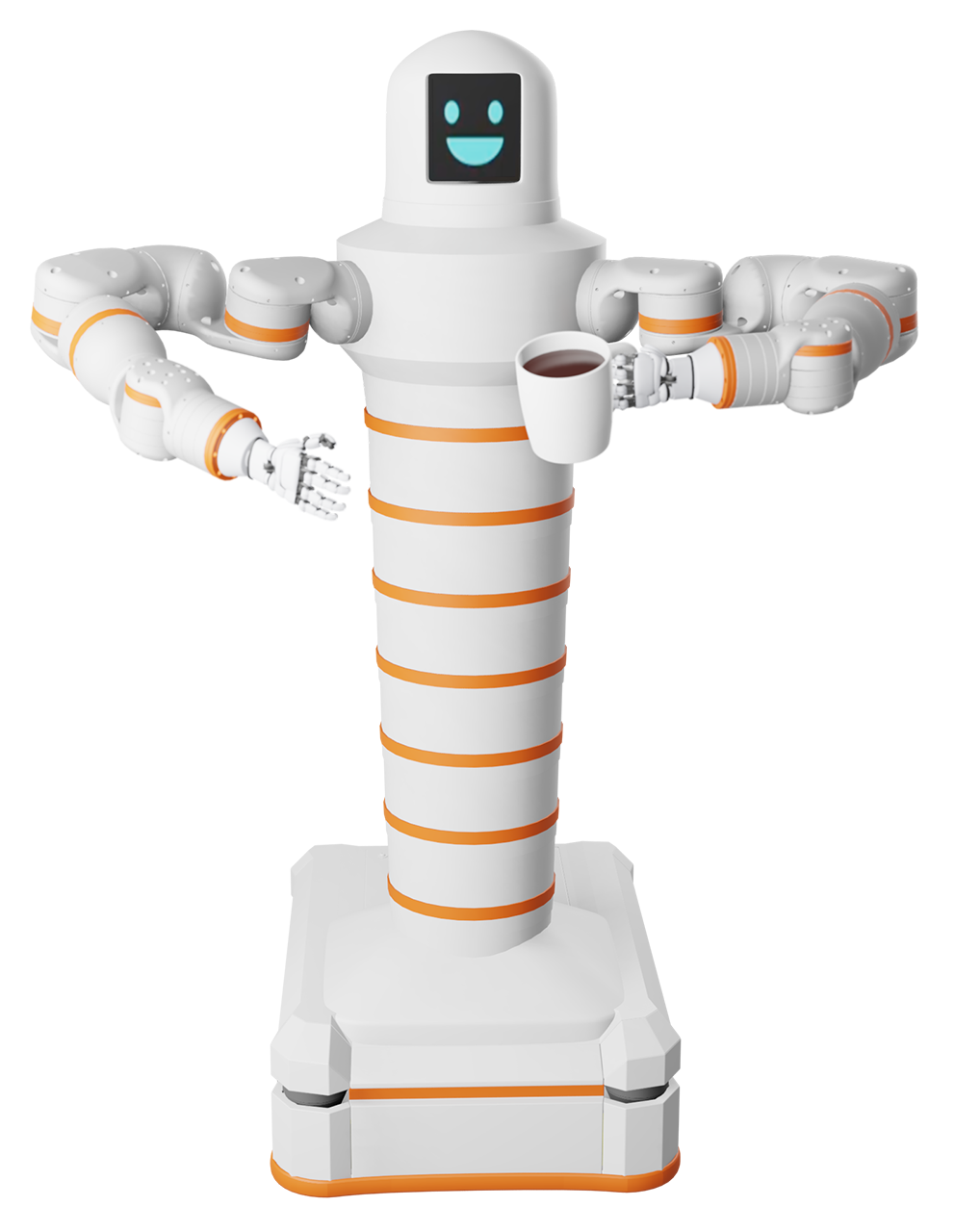
Robert M3
Development
Humanoid robot for service applications
With its wide range of functions, Robert M3 can provide support in household, care and service
Thanks to the height-adjustable upper body he can get to any shelf